 da
da de
de en
en es
es fr
fr it
it nb
nb pt
pt sv
sv fi
fiDe stuurhoeksensor en acceleratiesensor: een complete gids
De stuurhoeksensor zit meestal precies gemonteerd waar je deze ook zou verwachten: achter het stuur, rondom de stuurkolom. Zo nu en dan kiest een fabrikant ervoor om de sensor vlakbij het stuurhuis te plaatsen, maar dit komt vrij weinig voor. Er zijn meerdere types in omloop. Het type op basis van het Hall-effect is het populairst, maar versies met sleepcontacten komen ook nog steeds voor. Daarnaast bestaan er ook nog digitale optische sensoren die een specifiek signaal afgeven voor de op dat moment gemeten draaihoek. We zullen de onderlinge verschillen kort benoemen.
Analoog met sleepcontact
De analoge stuurhoeksensor is opgebouwd uit twee potentiometers, ook wel spanningsdelers genoemd. Deze spanningsdelers gebruiken een vaste weerstandsbaan, vaak van koolstof, waar de spanning doorheen loopt. Een bewegend sleepcontact beweegt over deze weerstandsbaan en de positie waarin het contact zich op dat moment bevindt, bepaalt hoeveel spanning er wordt doorgegeven. Er zijn versies die met een referentiespanning van 5 volt werken en versies die 12 volt gebruiken. De tweede spanningsdeler is overigens niet bedoeld als controlemiddel, maar om de draairichting van het stuur te bepalen: linksom of rechtsom. Door de spanningsdelers tegengesteld te plaatsen, kan door het onderlinge verschil in spanning bepaald worden of het stuur met de klok mee of tegen de klok in draait. De afgegeven spanning in de nulpositie (als het stuur en de wielen recht staan) kan per spanningsdeler verschillen. Dit is expres gedaan zodat na te meten is of de stuurhoeksensor correct functioneert. Er bestaan inmiddels erg veel varianten van dit type stuurhoeksensor, dus we kunnen helaas geen specifieke meetwaarden noemen.
Het komt voor dat de sleepcontacten zover verslijten dat er geen permanent contact meer mogelijk is. Om die reden worden sleepcontacten steeds minder gebruikt in de auto-industrie. Mocht zo’n stuurhoeksensor dus uitvallen of af en toe het signaal verliezen, controleer dan eerst die sleepcontacten.
Hall-effect
Stuurhoeksensoren die gebruik maken van het Hall-effect (zoals de Bosch LWS5 en LWS6) werken contactloos en hebben daarom dus geen last van slijtage. Net als bij actieve wielsensoren het geval is, maakt deze stuurhoeksensor gebruik van een meerpolige ring. De Hall-sensoren (inderdaad, meerdere) detecteren iedere beweging met een nauwkeurigheid van 1,5 graad en genereren bloksignalen richting de control unit. De fase van het signaal van elke Hall-sensor is verschillend zodat direct de draairichting bepaald kan worden en uitgesloten kan worden dat de sensor niet naar behoren werkt. Wat volgt is een berekening van de actuele stuurhoek, de draairichting en de draaisnelheid. Het resultaat wordt omgezet in een CAN-signaal en direct daarna verstuurd naar de ESP-ECU.
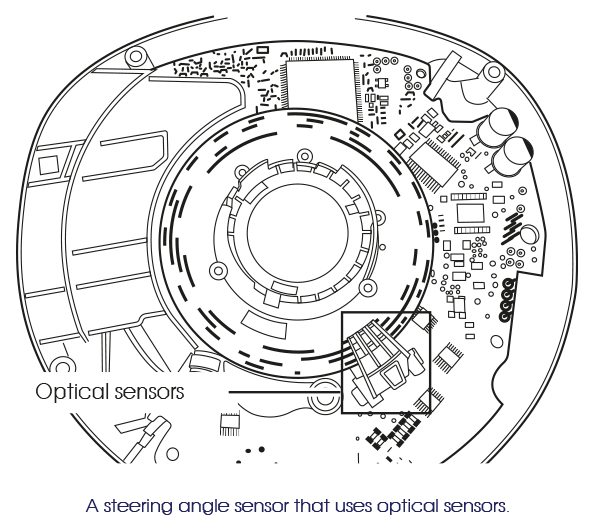
Optisch
Vooral Mercedes-Benz was een tijd lang groot fan van optische stuurhoeksensoren. Ook dit type sensor genereert meerdere bloksignalen, maar in plaats van magnetisme wordt er nu gebruik gemaakt van licht. Door gebruik te maken van meerdere banen met elk een eigen gatenpatroon, worden er verschillende signalen gecreëerd. Deze signalen worden door de controller vergeleken en het resultaat wordt omgezet in een bruikbaar digitaal signaal.
In eerste instantie zou je denken dat dit type sensor eigenlijk net zo goed werkt als een Hall-sensor, maar optische sensoren hebben één grote vijand: vervuiling. Een beetje stof kan al voldoende zijn om de lichtstraal te blokkeren en zo het signaal te verstoren. Optische sensoren zijn daardoor eigenlijk alleen geschikt voor een volledig afgesloten omgeving.
Controleer bij storingen met optische sensoren dus altijd eerst op stof en andere vervuiling. Het wegblazen van deze vervuiling kan al genoeg zijn om de storing op te lossen!
Kalibratie
Het kalibreren van de stuurhoeksensor is met behulp van goede diagnoseapparatuur heel eenvoudig. Vaak is één keer volledig naar links en naar rechts sturen genoeg om de sensor volledig in te leren. Er zijn ook zelflerende sensoren bekend. Daarbij is één keer volledig naar links en naar rechts sturen bij ingeschakeld contact al voldoende. Het ESP-systeem kan in veel gevallen ook zelf detecteren of kalibratie nodig is door de waarden van de stuurhoeksensor te vergelijken met die van de diverse acceleratiesensoren. Mocht het systeem merken dat de auto continu rechtdoor rijdt, maar de stuurhoek toch teveel afwijkt, dan zal ESP zich uitschakelen en het storingslampje gaan branden.
Elektrische stuurbekrachtiging
De stuurhoeksensor wordt niet alleen gebruikt om het ESP aan te sturen, maar ook voor de regeling van elektrische stuurbekrachtiging. Een elektromotor bekrachtigt de stuurbeweging zodra een verandering in stuurhoek gedetecteerd wordt. Hydraulische bekrachtiging wordt hiermee overbodig. Het voordeel van dit systeem zit hem niet alleen in de ruimte- en gewichtsbesparing, maar ook in de instelmogelijkheden van de stuurinrichting. Hierdoor kan bijvoorbeeld een comfortabel of juist sportief gevoel gecreëerd worden. Ook kan het heel handig zijn bij inparkeren, denk bijvoorbeeld aan de ‘city’-knop van Fiat die het insturen extreem licht laat aanvoelen. Een nadeel van elektrische bekrachtiging is wel het gebrek aan gevoel: doordat de elektromotor de beweging bepaalt, worden reacties van de wielen op het wegdek nog maar nauwelijks voelbaar doorgegeven naar het stuur.
BMW 3 serie E90: kortstondige foutmeldingen DSC
Stel: af en toe verschijnt er kort een DSC-melding op het dashboard, maar deze verdwijnt net zo plotseling als deze gekomen is. Uitlezen werkt niet, want de fout wordt niet opgeslagen. Toch komt de melding zo nu en dan terug. Wat doe je dan? De enige optie die je dan hebt, is alles te controleren dat intermitterende klachten kan veroorzaken. Een tip die we in het geval van de BMW 3 serie E90 kunnen meegeven: controleer de stuurhoeksensor. Er zijn meerdere gevallen bekend waarbij de stuurhoeksensor zo erg verweerd was, dat deze klachten veroorzaakte. We weten niet waarom dit zo specifiek bij de E90 voorkomt.
Acceleratiesensor
Naast de stuurhoek heeft de ‘ESP-ECU’ ook actuele waarden nodig die vertellen welke beweging het voertuig maakt. Hiervoor zijn de acceleratiesensoren bedoeld. Deze sensoren zijn in twee varianten op te delen: de laterale acceleratiesensoren en de gierhoeksensoren. Toch zul je deze sensoren in de praktijk bijna nooit gescheiden tegenkomen: zowel Continental als Bosch hebben deze sensoren namelijk in één behuizing gebouwd. We zullen de sensor van de iets oudere Bosch 5.7 ESP als voorbeeld nemen om de werking uit te leggen.
Kalibratie ESP-sensoren
Belangrijk voor systemen met ESP: na montage dienen altijd alle ESP-sensoren opnieuw gekalibreerd te worden. De betere universele diagnoseapparatuur heeft deze functie ook. Gebeurt dit niet, dan zullen er gegarandeerd storingen optreden.
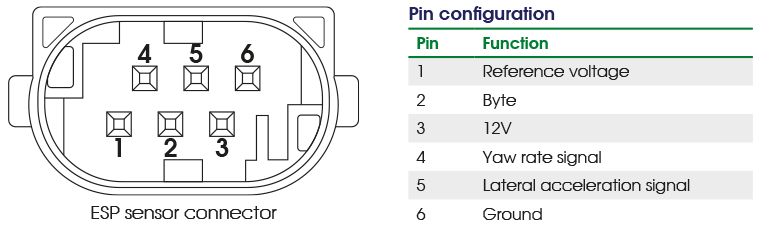
De ESP-sensor maakt gebruik van een voeding (12V), massa en een bite (bloksignaal, 0 – 6,8V). De bite wordt gebruikt als controlemiddel en weer meegestuurd met het uitgangssignaal van de gierhoeksensor. Verder maakt de gierhoeksensor ook gebruik van een referentiespanning (2,5V). De gierhoeksensor zal deze referentiespanning positief of negatief beïnvloeden: positief bij een positieve gierhoek, negatief bij een negatieve gierhoek. De output varieert hierdoor van 0,7V tot 4,3V. Doordat de controle-bite dit signaal beïnvloed, moet het uitgangssignaal er als volgt uitzien:
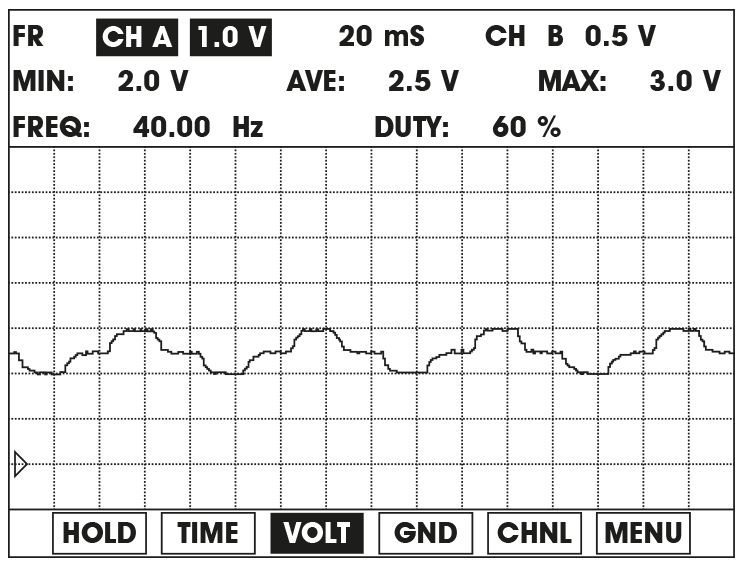
LET OP: Bij een rechtlijnig signaal is de sensor dus defect!
De laterale acceleratiesensor maakt geen gebruik van de referentiespanning en de controle-bite. Het uitgangssignaal is rechtlijnig en varieert van 0,5V tot 4,5V. Om deze waarden te halen zal een gravitatiekracht van -1.5 G of +3,5 G gehaald moeten worden.
Evolutie
Hoewel voorgaand verhaal veel inzicht geeft in de werking van ESP-sensoren, is er inmiddels wel veel veranderd. Net zoals de rest van de elektronica in voertuigen, werd er ook bij ESP langzaam overgestapt van analoge signalen naar CAN-berichten. Eén centraal netwerk biedt immers veel voordelen. Om twee voorbeelden te noemen: het signaal is in het gehele voertuig beschikbaar en er wordt enorm bespaard op bekabeling. Dit scheelt ruimte én gewicht.
Ook de techniek in de sensoren zelf is erop vooruitgegaan. Maken we de vergelijking tussen Bosch 5.7 ESP en Bosch 8.0 ESP, dan zien we duidelijke verschillen. Zowel de laterale sensor als de gierhoeksensor maken nu gebruik van piëzo-elektrisch materiaal dat een steeds grotere spanning afgeeft naarmate de acceleratiekracht groter wordt.
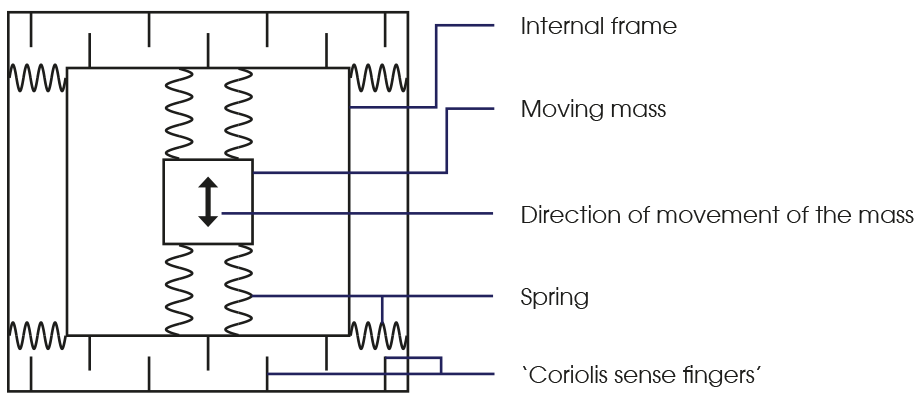
In het midden van het piëzo-elektrisch materiaal is een afgeveerde massa geplaatst. Zodra de auto in een bepaalde richting versnelt of draait, doet de massa dit ook. De kracht die ervoor nodig is om deze massa uit de rustpositie te krijgen, genereert een bepaald voltage in het piëzo-elektrisch materiaal. Het is waarschijnlijk overbodig om uit te leggen dat dit voltage stijgt naarmate de massa meer uit zijn rustpositie wordt bewogen.
Dit voltage wordt op zijn beurt weer omgezet in een elektrisch signaal. Door een berekening los te laten op de waarden van de laterale versnelling en de draaiversnelling, kan hiermee ook de beweging van de auto met de stuurhoek worden vergeleken.
Een leuk weetje:
De nieuwere generatie gierhoeksensor wordt ook wel iMEMS genoemd: integrated Micro Electro-Mechanical System. De gierhoeksensor is door deze techniek zo klein geworden dat integratie in de ECU geen enkel probleem meer is. Moderne ABS ECU’s, zoals bepaalde types van de ATE Teves MK60E, hebben hierdoor dus helemaal geen externe ESP-sensoren meer nodig.
Denk hier dus goed over na bij storingen met betrekking tot ESP: de storing kan zich tegenwoordig ook binnenin de ECU bevinden.
Foutcode 01423 - Yaw rate sensor
Bij incorrect basic setting / adaptation: voer de basissetting nogmaals uit. Bij electric circuit failure: controleer de bedrading naar de yaw rate sensor (G200) en controleer de voedingsspanning naar de sensor toe. Alles in orde? Vervang dan de sensor. Blijft de foutcode daarna nog aanwezig, neem dan contact op met onze klantenservice.
Active Steering
Auto’s die zijn uitgevoerd met Active Steering, zoals BMW en Mercedes-Benz, hebben twee ESP-sensoren: een hoofdsensor onder de bestuurdersstoel en een secundaire sensor onder de passagiersstoel. De tweede sensor is grotendeels gelijk aan de hoofdsensor, maar heeft een afsluitweerstand (dit heeft de hoofdsensor niet) en gebruikt ook een ander CAN-ID. Je kunt de sensoren dus niet onderling uitwisselen. De manier waarop beide sensoren door het ESP-systeem worden gebruikt, verschilt nogal. De waarden van de tweede sensor worden puur gebruikt als controlemiddel voor de waarden van de hoofdsensor. De tweede sensor kan de functie van de hoofdsensor dus niet overnemen. Zodra er een verschil tussen beide sensoren wordt gemeten, gaat het systeem in storing. Overigens werken beide sensoren passief: er wordt pas een signaal verzonden zodra de ECU van het ESP-systeem dit vraagt. Zoals al eerder is vermeld, gebeurt dit gelukkig wel elke 10 milliseconden.